RADOLAN adjustment example with OpenMRG CML data¶
[1]:
# %load_ext autoreload
# %autoreload 2
[2]:
import matplotlib.pyplot as plt
import numpy as np
import poligrain as plg
import xarray as xr
import mergeplg as mrg
Load and prepare OpenMRG data¶
[3]:
ds_rad, ds_cmls, ds_gauges, ds_gauges_smhi = mrg.io.load_and_transform_openmrg_data()
# UTM32N: https://epsg.io/32632
ref_str = "EPSG:32632"
# Fix error where lat/lon was set to variable
ds_rad = ds_rad.set_coords(["longitudes", "latitudes"])
ds_rad = ds_rad.rename({"rainfall_amount": "rainfall_radar"})
# Fix naming errors
ds_rad = ds_rad.rename({"longitudes": "lon", "latitudes": "lat"})
# Reproject radar and CML coordinates to UTM32N
# For CML
(
ds_cmls.coords["site_0_x"],
ds_cmls.coords["site_0_y"],
) = plg.spatial.project_point_coordinates(
ds_cmls.site_0_lon, ds_cmls.site_0_lat, ref_str
)
(
ds_cmls.coords["site_1_x"],
ds_cmls.coords["site_1_y"],
) = plg.spatial.project_point_coordinates(
ds_cmls.site_1_lon, ds_cmls.site_1_lat, ref_str
)
# Midpoint
ds_cmls.coords["x"] = (ds_cmls.site_0_x + ds_cmls.site_1_x) / 2
ds_cmls.coords["y"] = (ds_cmls.site_0_y + ds_cmls.site_1_y) / 2
# Projected radar coords
ds_rad.coords["x_grid"], ds_rad.coords["y_grid"] = (
plg.spatial.project_point_coordinates(ds_rad.lon, ds_rad.lat, ref_str)
)
Set up RADOLAN merger object and loop over time steps to apply adjustment¶
[4]:
merger = mrg.merge.MergeRADOLAN(
ds_rad=ds_rad.rainfall_radar,
ds_cmls=ds_cmls,
max_distance=30e3,
grid_location_radar="lower_left",
)
rainfall = []
for time in ds_cmls.time.data:
rainfall.append(
merger(
da_rad=ds_rad.sel(time=time).rainfall_radar,
da_cmls=ds_cmls.R.sel(time=time),
start_index_in_relevant_stations="random",
)
)
ds_radolan = xr.concat(rainfall, dim="time")
The adjusted product is called RW. Note that for DWD’s radar-adjustment product, the RW product is an hourly radar-gauge adjustment. Here, we apply the same adjustment steps to the 5min data. Radar-adjustment at this temporal resolution is challenging due to spatio-temporal mismatch of radar observations and ground observations from gauge and/or CML.
All intermediate products of the RADOLAN adjustment method are stored in the returned xr.Dataset
[5]:
ds_radolan.data_vars
[5]:
Data variables:
RH (time, y, x) float64 440kB 0.01078 ... 0.05403
RG (time, y, x) float64 440kB 0.01078 ... 0.05403
RB (time, y, x) float64 440kB 0.01078 ... 0.05403
dbr_interim (time, y, x) float64 440kB 0.0 0.0 ... 0.0 0.0
fbr_interim (time, y, x) float64 440kB 1.0 1.0 ... 1.0 1.0
addiff_interim (time, y, x) float64 440kB 0.01078 ... 0.05403
mulfak_interim (time, y, x) float64 440kB 0.01078 ... 0.05403
weight_addiff_interim_audit (time, y, x) float64 440kB 0.5 0.5 ... 0.5 0.5
weight_mulfak_interim_audit (time, y, x) float64 440kB 0.5 0.5 ... 0.5 0.5
dbr_relevant (time, y, x) float64 440kB 0.0 0.0 ... 0.0 0.0
fbr_relevant (time, y, x) float64 440kB 1.0 1.0 ... 1.0 1.0
addiff_relevant (time, y, x) float64 440kB 0.01078 ... 0.05403
mulfak_relevant (time, y, x) float64 440kB 0.01078 ... 0.05403
RW_not_rounded (time, y, x) float64 440kB 0.01078 ... 0.05403
RW (time, y, x) float64 440kB 0.0 0.0 ... 0.0 0.0
RW_interim (time, y, x) float64 440kB 0.01078 ... 0.05403
RR (time, y, x) float64 440kB nan nan ... nan nan
RW_no_station_fill (time, y, x) float64 440kB 0.0 0.0 ... 0.0 0.0
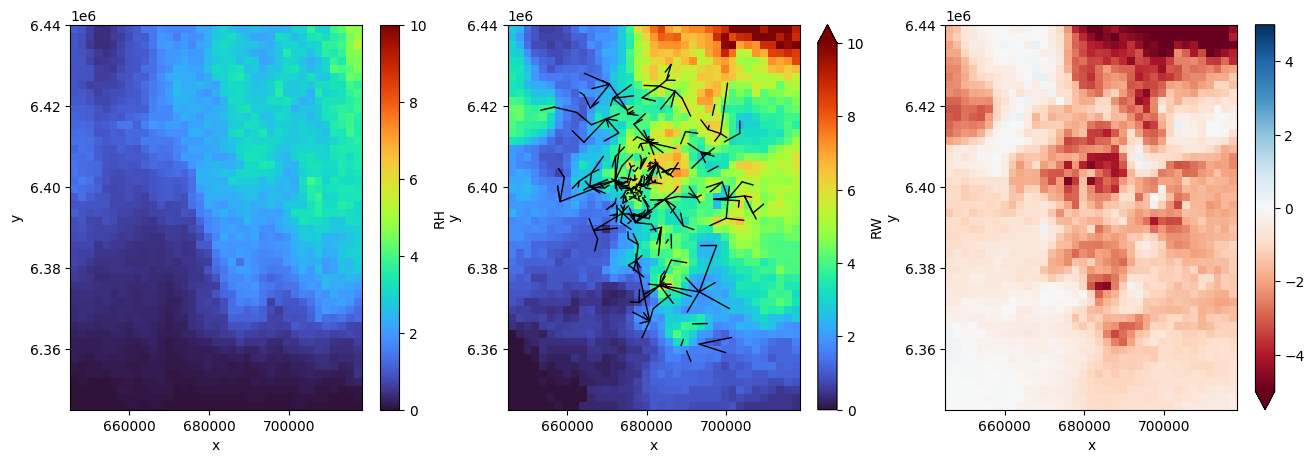
Compare unadjusted and adjusted radar rainfall fields¶
Look at rainfall sum of example dataset¶
[6]:
vmin, vmax = 0, 10
cmap = "turbo"
fig, axs = plt.subplots(1, 3, figsize=(16, 5))
ds_radolan.sum(dim="time").RH.plot(ax=axs[0], vmin=vmin, vmax=vmax, cmap=cmap)
ds_radolan.sum(dim="time").RW.plot(ax=axs[1], vmin=vmin, vmax=vmax, cmap=cmap)
(ds_radolan.sum(dim="time").RH - ds_radolan.sum(dim="time").RW).plot(
ax=axs[2],
vmin=-5,
vmax=5,
cmap="RdBu",
)
plg.plot_map.scatter_lines(
x0=ds_cmls.site_0_x,
x1=ds_cmls.site_1_x,
y0=ds_cmls.site_0_y,
y1=ds_cmls.site_1_y,
ax=axs[1],
s=1,
c="k",
)
[6]:
<matplotlib.collections.LineCollection at 0x168643080>
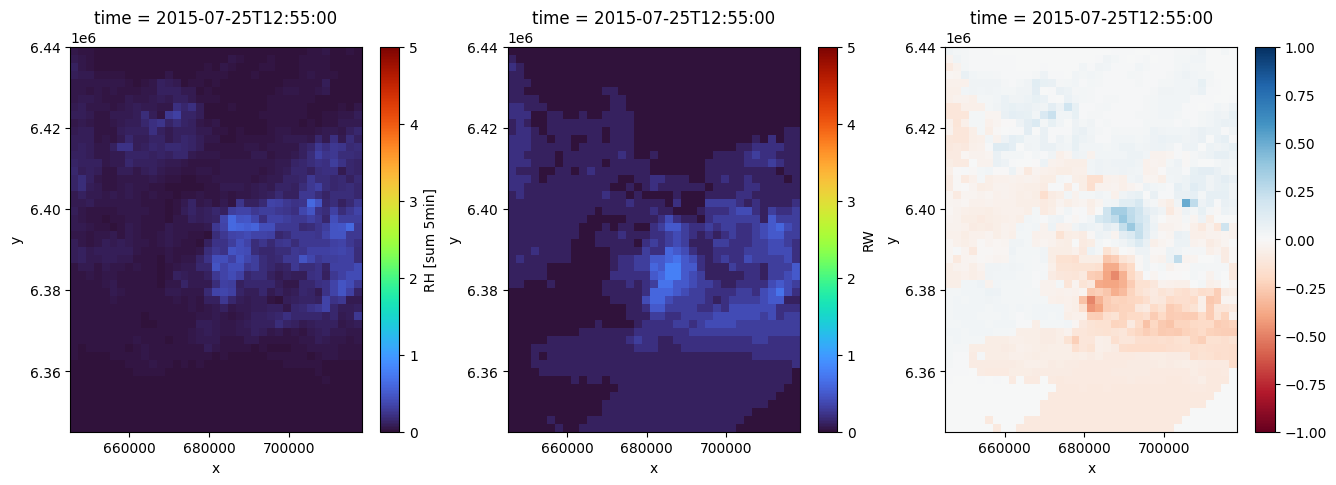
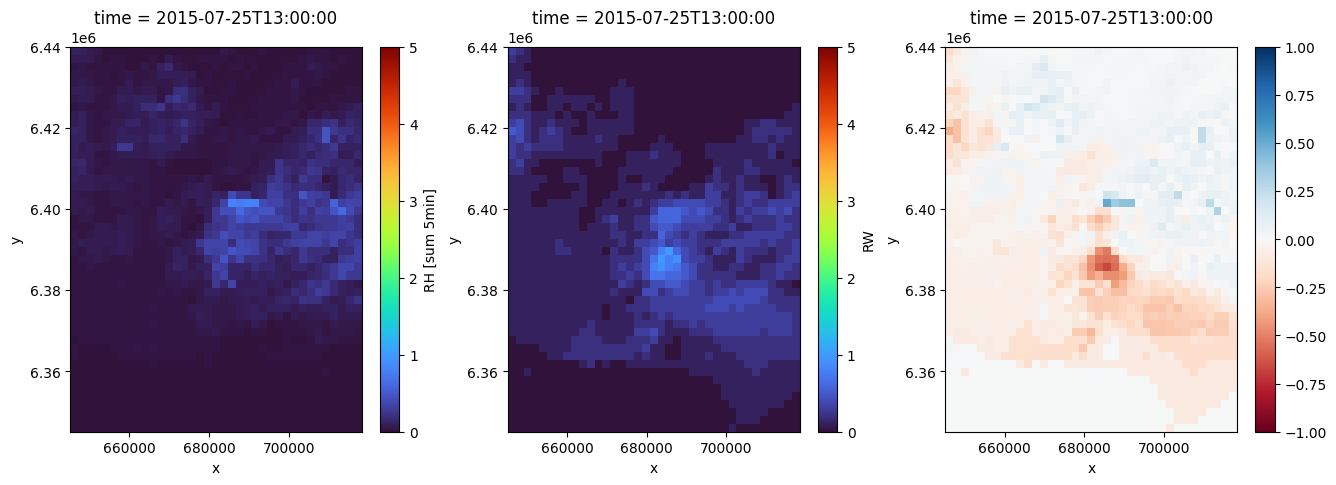
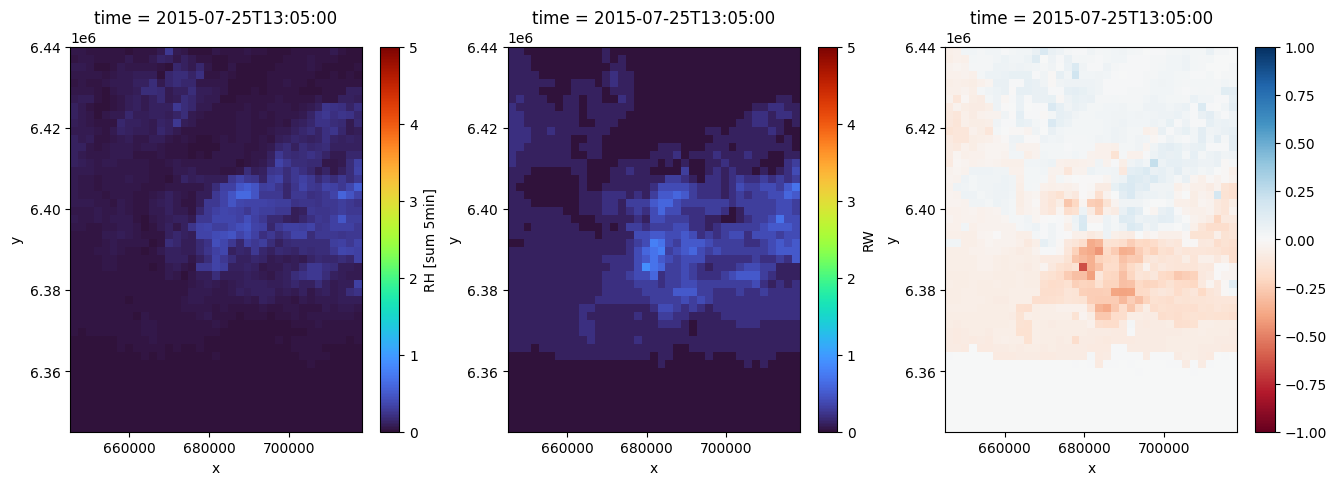
Look at individual time stamps¶
[7]:
for t in ds_radolan.time.data[5:8]:
vmin, vmax = 0, 5
cmap = "turbo"
fig, axs = plt.subplots(1, 3, figsize=(16, 5))
ds_radolan.sel(time=t).RH.plot(ax=axs[0], vmin=vmin, vmax=vmax, cmap=cmap)
ds_radolan.sel(time=t).RW.plot(ax=axs[1], vmin=vmin, vmax=vmax, cmap=cmap)
(ds_radolan.sel(time=t).RH - ds_radolan.sel(time=t).RW).plot(
ax=axs[2],
vmin=-1,
vmax=1,
cmap="RdBu",
)
Validate unadjusted and adjusted radar rainfall fields at gauge locations¶
[8]:
# We need to add these to comply with the OPENSENSE naming conventions
# ds_rad.coords["lon"] = ds_rad.longitudes
# ds_rad.coords["lat"] = ds_rad.latitudes
# x_grid, y_grid = np.meshgrid(ds_rad.x.values, ds_rad.y.values)
# ds_rad.coords["x_grid"] = (("y", "x"), x_grid)
# ds_rad.coords["y_grid"] = (("y", "x"), y_grid)
grid_at_points = plg.spatial.GridAtPoints(
da_gridded_data=ds_rad.rainfall_radar,
da_point_data=ds_gauges.rainfall_amount.rename({"station_id": "id"}),
nnear=1,
)
ds_gauges.coords["id"] = ds_gauges.station_id
[9]:
radar_at_gauges = grid_at_points(
da_gridded_data=ds_rad.rainfall_radar,
da_point_data=ds_gauges.rainfall_amount,
)
RW_at_gauges = grid_at_points(
da_gridded_data=ds_radolan.RW_not_rounded,
da_point_data=ds_gauges.rainfall_amount,
)
[10]:
extent = [0, 1.5, 0, 1.5]
gridsize = 15
fig, axs = plt.subplots(1, 2, figsize=(12, 5))
axs[0].hexbin(
ds_gauges.rainfall_amount,
radar_at_gauges,
mincnt=1,
extent=extent,
gridsize=gridsize,
bins="log",
)
axs[1].hexbin(
ds_gauges.rainfall_amount,
RW_at_gauges,
mincnt=1,
extent=extent,
gridsize=gridsize,
bins="log",
);
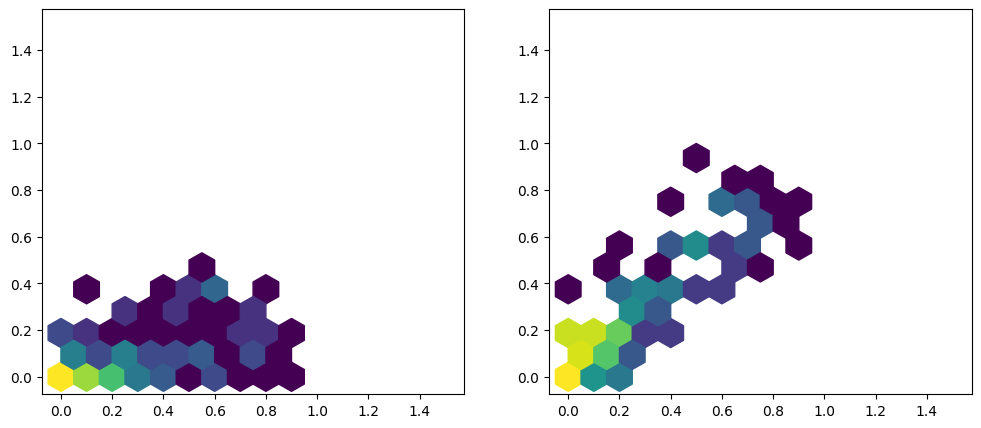
[11]:
R_gauge = ds_gauges.rainfall_amount.data.flatten()
R_unadjusted = radar_at_gauges.data.flatten()
R_adjusted = RW_at_gauges.data.flatten()
corr_unadjusted = np.corrcoef(R_gauge, R_unadjusted)[0, 1]
corr_adjusted = np.corrcoef(R_gauge, R_adjusted)[0, 1]
rmse_unadjusted = np.sqrt(np.mean((R_gauge - R_unadjusted) ** 2))
rmse_adjusted = np.sqrt(np.mean((R_gauge - R_adjusted) ** 2))
print(" unadjusted adjusted")
print(f"PCC: {corr_unadjusted:0.2f} {corr_adjusted:0.2f}")
print(f"RMSE: {rmse_unadjusted:0.2f} {rmse_adjusted:0.2f}")
unadjusted adjusted
PCC: 0.63 0.87
RMSE: 0.20 0.11
[ ]: